The trick
Pass an electric current through a wire that's sitting in a magnetic field, and the wire feels a force pushing it sideways. Perpendicular to both the current direction and the magnetic field direction.
That's the entire physics of an electric motor. The rest is engineering: arrange the wire in a coil, surround it with magnets, get the current to flow in the right direction at the right time, and the coil rotates continuously.
The same physics underlies dozens of variations — DC motors, AC motors, induction motors, stepper motors, brushless motors, linear motors, motors the size of a grain of rice in your phone, motors the size of a railway car in a power plant. All of them are exploiting the same force between current and magnetic field.
The Lorentz force
The fundamental physics is the Lorentz force: a charged particle moving in a magnetic field experiences a force perpendicular to both its velocity and the field.
For a single charge: F = qv × B (the × is the vector cross product).
For a current-carrying wire: F = IL × B, where I is the current, L is a vector along the wire in the direction of current flow, and B is the magnetic field.
The cross product means the force is perpendicular to both I and B. If current flows right and the field points up, the wire is pushed away from you (or toward you, depending on signs).
This is the engine of every motor.
A working simple motor
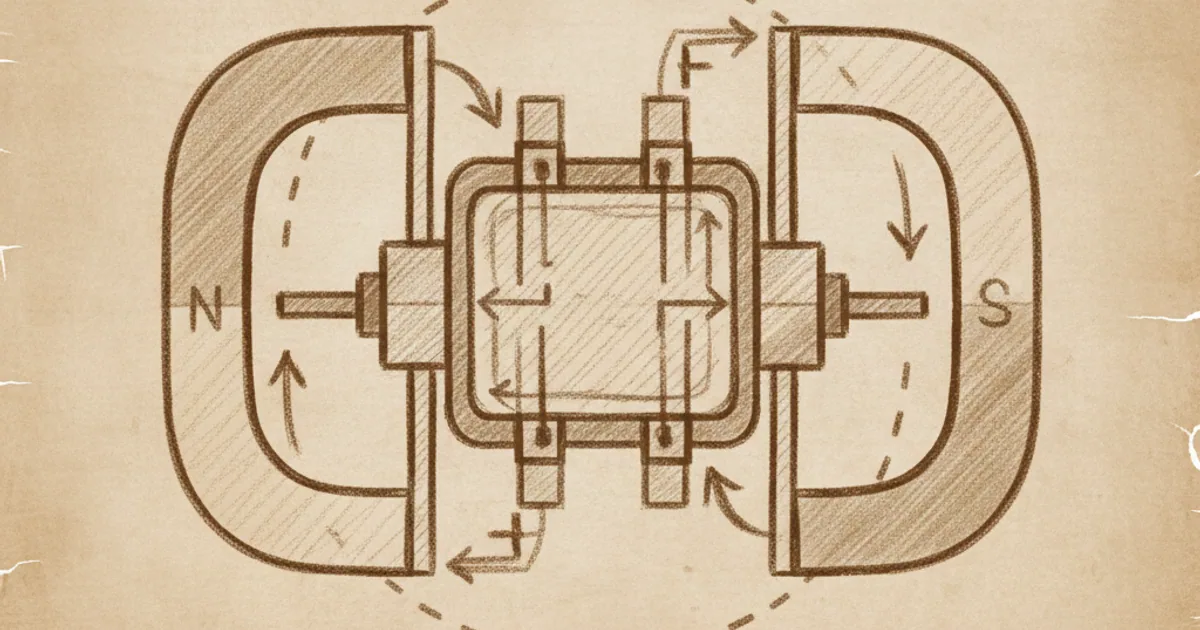
Imagine a single rectangular coil of wire suspended between two permanent magnets, with current flowing through it.
- On one side of the coil, current flows (say) toward you. The magnetic field is horizontal. The Lorentz force pushes that side of the coil up.
- On the other side, current flows away from you (same loop, opposite direction). The force on that side is down.
- Result: the coil rotates around its long axis.
Once the coil has turned 90°, both sides of the coil are now parallel to the field, and the Lorentz force is along the axis rather than producing torque. Without intervention, the coil would oscillate around this position rather than rotating continuously.
The trick to keep it spinning: reverse the current direction every half-turn. After 180°, the side that was being pushed up is now on the opposite side and needs to be pushed down to continue rotation. Reversing the current does exactly that.
This is what a commutator does in a DC motor — it's a mechanical rotating switch that reverses the current in the coil twice per rotation. The result is continuous rotation under DC power.
The main motor types
Several practical motor designs all exploit the same Lorentz physics:
Brushed DC motors
The simplest motor, conceptually similar to the description above:
- Permanent magnets provide a fixed field.
- A rotating coil (the rotor or "armature") carries the current.
- A mechanical commutator and brushes (carbon contacts) feed current to the rotor and reverse it at the right moments.
Properties: simple, cheap, but brushes wear out and create electrical noise. Common in toys, small fans, hand tools, automotive accessories.
Brushless DC motors (BLDC)
Same basic idea, but the commutation is done electronically rather than with brushes. Permanent magnets are on the rotor; coils are on the stationary outer housing (stator); an electronic controller switches current through the coils based on sensors detecting rotor position.
Properties: more reliable (no wearing brushes), more efficient, more expensive (need an electronic controller). Common in modern devices: hard disk drives, drone motors, electric vehicle drive motors, ceiling fans, washing machines.
Modern EV traction motors are typically permanent-magnet synchronous machines (PMSM) or AC induction motors driven by sophisticated inverters — Tesla has historically used both, depending on model. The controllers are sophisticated and can adjust speed and torque precisely.
AC induction motors
The workhorse of industry. Invented by Nikola Tesla (with prior work by Galileo Ferraris) in the 1880s.
Key insight: AC current naturally alternates direction. If you arrange multiple coils around a rotor and feed them with phase-shifted AC currents, you create a rotating magnetic field that sweeps around the inside of the motor.
The rotor is a passive structure of conductors (typically a "squirrel cage" of aluminum or copper bars). The rotating magnetic field induces currents in these conductors (Faraday's law), and the induced currents interact with the rotating field to produce a force that drags the rotor along.
Crucially, the rotor doesn't quite keep up with the rotating field — it spins slightly slower (this is called slip). Without slip, there would be no induced currents and no force. The slip is a few percent of the field rotation speed under load.
Properties: extremely simple rotor (no brushes, no permanent magnets), reliable, cheap to manufacture. Used in essentially every industrial machine, most household appliances (refrigerators, washing machines, air conditioners), and many electric vehicles. The dominant motor of modern industry.
Synchronous motors
Similar to induction motors but with a rotor that has its own magnetic field — either from permanent magnets or from a DC current applied via slip rings. The rotor stays exactly synchronized with the rotating stator field (no slip).
Properties: precise speed control, high efficiency. Used in clocks, some industrial machinery, and increasingly in EVs (where permanent-magnet synchronous motors offer better efficiency than induction motors).
Stepper motors
Designed to move in precise discrete angular steps rather than continuously. Used where exact positioning matters: printers, 3D printers, CNC machines, hard disk read-head positioning.
A stepper motor has many coils arranged so that energizing different coils makes the rotor align to specific angular positions. You "step" the motor by sequencing the coil energization — typically 200 steps per revolution (1.8° per step) is common, with microstepping allowing much finer control.
Linear motors
Same physics, but arranged to produce linear (not rotational) motion. The "coil" and "magnet" sections are essentially "unrolled" along a track. Used in maglev trains, some industrial conveyors, and some elevator designs.
The Shanghai Maglev train and Japan's Chuo Shinkansen both use linear motors for propulsion.
Generators: the reverse
Reverse a motor — mechanically rotate the coil through the magnetic field — and you produce electric current. This is electromagnetic induction, discovered by Michael Faraday in 1831.
When you push a conductor through a magnetic field (or change the field around a stationary conductor), an electromotive force is induced in the conductor. If the conductor forms a closed loop, current flows.
A generator is essentially a motor run in reverse. Most large generators are AC: a rotor with electromagnets spins inside a stator wound with multiple coils, producing AC at the output. The AC frequency depends on the rotor speed and the number of magnetic pole pairs.
Almost all of the world's electricity is generated this way. Whether the energy source is coal, natural gas, nuclear, hydro, wind, or geothermal — the final conversion is mechanical-to-electrical via a rotating magnet and coils.
Solar PV is the exception — it uses the photovoltaic effect (related to but distinct from the strict-physics photoelectric effect) to convert light directly to electricity without a generator.
How big can motors get? How small?
The size range is enormous:
Smallest practical motors: about 1 mm in diameter. Vibration motors in smartphones, tiny motors in watches and microcameras. Some experimental MEMS motors are 100 μm or smaller.
Phone vibration motor: typically 4-10 mm diameter. Spins an offset weight to produce vibration.
Drone motors: 10-50 mm diameter. High RPM, brushless, optimized for power-to-weight.
Power tool motors: 50-200 mm. AC or brushless DC.
Industrial pump motors: typically 0.5-10 kW, 10-30 cm diameter.
EV traction motors: typically 50-300 kW. Modern designs are compact (Tesla Model S motor is about 30 cm diameter).
Industrial motors: up to thousands of kW for steel mills, ship propulsion, large pumps.
Power station generators: 10,000-1,000,000 kW (1 GW) and up. Several meters in diameter, weighing hundreds of tonnes. Found across nuclear, large hydro, and large thermal plants; the very largest units come from a mix of these applications.
The physics is the same; only the engineering scales.
Efficiency
Modern electric motors are remarkably efficient (efficiency depends on size, type, and load):
- Industrial induction motors: typically 85-95% under normal load; smaller motors usually less.
- IE3/Premium-efficiency motors (medium-to-large): typically mid-90% range; IE4/IE5 classes can reach higher in some sizes.
- EV traction motors: ~90-96% peak in optimal operating conditions.
- Small consumer motors: often 60-80%.
By contrast, internal combustion engines achieve only 25-35% efficiency typically. The reason: ICEs are heat engines, limited by thermodynamic Carnot efficiency for the temperatures they operate at. Electric motors aren't heat engines — they convert electrical energy directly to mechanical, with losses only from electrical resistance, magnetic hysteresis, eddy currents, and bearing friction.
This efficiency gap is part of why EVs use much less primary energy than ICE vehicles. Even when EV electricity is generated from fossil fuel, the chained efficiency (modern combined-cycle plants can exceed 60% thermal efficiency, then transmission and charging losses, then high-efficiency motors) typically still beats a typical ICE car well-to-wheel — though the exact numbers vary widely by plant mix, grid, and vehicle. With cleaner electricity, the advantage grows.
A note on torque vs power
Two related but distinct properties of a motor:
Torque — the rotational force the motor can exert. Measured in newton-meters (N·m).
Power — the rate at which the motor does work. P = torque × angular velocity. Measured in watts (W) or horsepower.
Different motors have different torque-speed characteristics:
- DC motors: typically very high torque at low speed (start-up torque); torque falls off as speed increases.
- Induction motors: nearly constant torque at most operating speeds, falling off near maximum.
- Stepper motors: torque drops at higher step rates.
Cars and EVs both need lots of torque at low speed (to accelerate from a stop) and high power at speed (to maintain highway speed). Gasoline engines use multi-speed gearboxes to multiply torque at low speeds. Most EVs use just a single-speed reduction gear — they don't need multiple gear ratios because the motor produces high torque from zero RPM all the way up. This is one reason EVs feel responsive from a standstill.
A simple project
You can build a working electric motor from very basic materials:
- A D-cell battery (1.5 V).
- A small neodymium magnet.
- A coil of insulated wire wound into a small loop, with the ends stripped on one side only (so the loop becomes a single-direction commutator — current flows for half the rotation and stops for the other half).
- A simple mount made of paperclips.
This is a classic classroom DC coil motor demo — the partial wire-strip acts as a primitive commutator. (Note: this is distinct from a "homopolar motor," which is a different demo design using a battery, magnet, and conducting wire arrangement.) With practice it spins at a few hundred RPM. The same physics scales up to industrial motors with more sophisticated commutation.
YouTube has many tutorials. It's a good way to make the Lorentz force concrete.
If you'd like a guided 5-minute course on how electric motors work, NerdSip can generate one.
The takeaway
An electric motor exploits the Lorentz force — the force on a current-carrying wire in a magnetic field. Arrange coils between magnets, switch the current direction at the right moments (with a mechanical commutator in DC motors, electronic control in brushless motors, or AC supply in induction motors), and the coils rotate continuously. The same device run in reverse (spinning the coils mechanically) generates electricity — this is how almost all of the world's electricity is produced. Modern medium-to-large motors can exceed 95% efficiency; smaller consumer motors are typically less efficient. The physics is the same across vastly different scales, from sub-millimeter MEMS motors to gigawatt power-station generators.
the same core principle running everything from my electric toothbrush to a train is wild once you actually see it. one trick, endless uses
we built one of these in school years ago and i genuinely never understood why it span untill now. magnets coils and a twisty force, makes sense